
Overview
For the RoboSub club at Montana State University called RoboCats we had to build an autonomous underwater vehicle that accomplish the task given to us at the competition. This is a multigeneration sub so most of the components were already designed or built. With this sub, I travel to the University of Maryland with a group of four members to compete at the RoboNation international RoboSub competition.
Members
Isaac Schmidt: President and Software Team
Kruize Christensen(Me): Vice President, Webmaster, Social Media, Business Team, and Software Team
Ethan Bandy: Electrical Lead and Mechanical Team
Tyler Koon: Software Lead

Catastrophe
Yes, this seems a little soon for something already going wrong but shipping did not do the team any favors. When we got our Robot it was in pieces. Some propellers broke off, our electrical rack was in multiple parts, and even the frame was off. So we started the competition without sleeping and basically rebuilding our entire sub. So we spent days tuning our robot to compete just rebuilding and making it able to run.
Mechanical Work
Frame
The mechanical work that needed to be done was making the frame of the robot even to prevent buoyancy issues when trying to move forward. During shipment, the whole robot was dropped on one side and need to be realigned. For doing this Ethan taking lead directed Kruize and Issace on some easier mechanical tasks to accomplish. Mailing undoing all the bolts and putting together parts that didn't require extensive knowledge.
Thruster
For the thruster two of them broke with the shipment. We had one replacement and two to fix. We manage to take the most broken thruster and replace it with the new one. After taking off the thruster we had waterproof the connection where the cables went outside the sub. To do this in the limited time we had we got fast-drying caulk. This managed the seal the best we could. For the second thruster, we took pieces from the one we took off and tried to piece together a somewhat usable thruster. To hold it together we used waterproof tape and caulk. For the majority of the competition, it stayed together.
Haul
During the competition, we had one issue that kept coming back to haunt us. With a few of the connections on the haul, we kept having a leak that got faster as we continued with the competition. We tried to block it up with caulk the best we could but it kept coming back. By the end of the competition, we had to call it with the score we had to prevent further damage to the robot. Also since the competing pool was deeper than the testing pools it cause our leak to spread faster due to the pressure of the water in the deeper pool.
Electrical Work
Most of the electrical work needing done was very straightforward. A few of the wires broke loose and need to be soldered back into place. Most of this was done by Kruize with help from Issac. After soldering, they were covered in electrical wires to prevent crossing wires and causing a short circuit.
Software Work
Since we had an incident with shipping most of the calibrating that we were planning for the robovision had to be terminated. We had to mainly focus on recoding the engines for moving the sub. This was harder said than done since we did not have an electrical engineer with us at the competition. So Tyler spent most of his time learning how to edit the code from the electrical engineers.
Competing
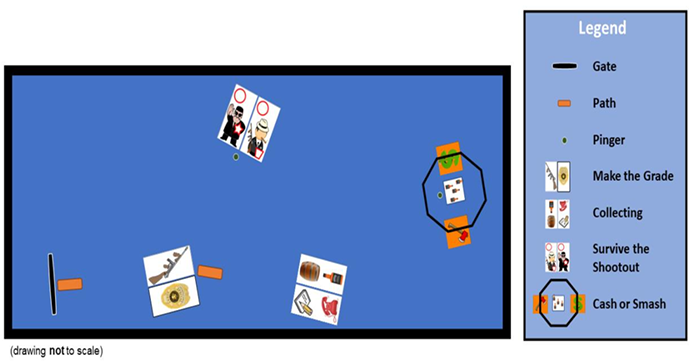
For the competition, we have to complete certain tasks that are in the obstacle course below. I will also add the parts that we completed.
Example Footage
In the video is a diver running through the obstacle course like a robot would do. This was to gain learning footage for our robovison for later competitions and to get a visual representation of what it looks like underwater.
Coin Flip
This is to determine if our robot and realine itself if it were to get disoriented. Our robot did end up doing this task in one of the runs we did.
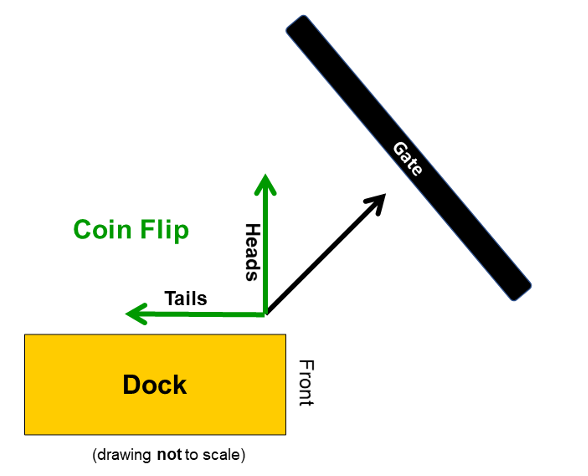
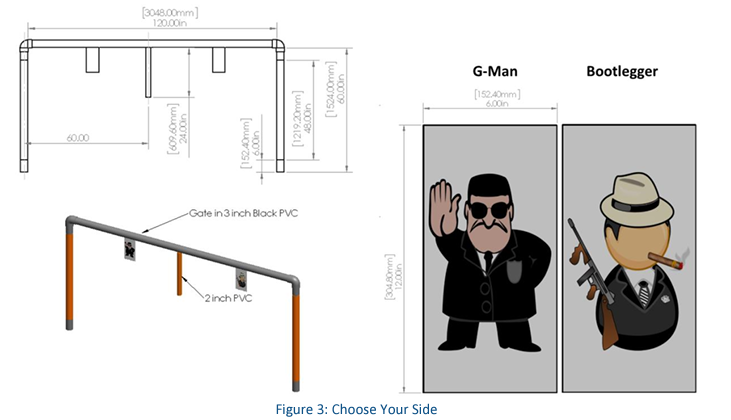
Gate
To qualify for the competition every team had to make it through the gate. Bonus points can be given by spinning or rotating while doing the task. For our run, we managed to get some bonus points by spinning while going through the gate. This is where we ended up in the competition and was the final task we ended up with. So our side didn't matter since the side the robot goes to determines the pather for the rest of the course.
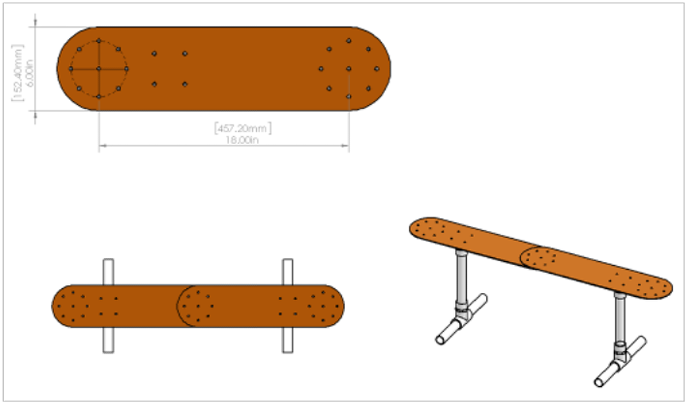
Path
Within the obstacle course, this is a path marker to indicate where to go. Normally our lower camera would follow these in order to locate the next task but with our RoboVison down we weren't able to use these.
Buoy
With the buoy, you are supposed to identify them based on the gate you went through. We were going to use robovison to identify the buoys based on the gate we chose.
Bin
For this task, you were to organize the items with an arm and drop them into the corresponding bins. Our robot doesn't have an arm so we decided to focus our resources elsewhere.
Torpedos
With our current robot, we do not have a torpedo system, but currently, it is in development for our next competition. The task is to shoot torpedoes into the opposite target of what you chose at the gate.
Cash or Smash and Octagon
For this task, we want to move the items into the corresponding areas for what we chose at the gate. After all, tasks are complete or as many as your team can accomplish you surface in the octagon. Beneath this is a pinger that is at a frequency the robots can read. A team can lock on till the sound is at it loudest and then surface.
Results
For our team, we ended up placing 12th. For our club that is a new record since the previous one was 14th. We could have attempted another run to beat this but we have to take the score we have since our haul had a pretty big pool in the bottom at the end. We all learned what needs to be improved upon for future competitions.
